Grippers များကို လျှပ်စစ်နှင့် pneumatic အပါအဝင် အမျိုးအစားများစွာ ခွဲခြားနိုင်သည်။ဒါဆို electric grippers နဲ့ pneumatic grippers တို့ရဲ့ ကွာခြားချက်ကဘာလဲ။
1- စက်မှုလက်စွပ်ဆိုတာ ဘာလဲ။
စက်မှုဂရစ်ပါများကို စက်ပိုင်းဆိုင်ရာ ဂရစ်ပါယန္တရားများဟုလည်း ခေါ်သည်။စက်ရုပ်ဂရစ်ပါယန္တရားသည် အမှန်တကယ် လုပ်ငန်းလိုအပ်ချက်အရ ဒီဇိုင်းထုတ်ထားပြီး ပုံစံအမျိုးမျိုးရှိသည်။
Mechanical grippers များသည် ယေဘူယျအားဖြင့် ရွေ့လျားမှု၊ ဆုပ်ကိုင်မှုနှင့် ယန္တရားဂုဏ်သတ္တိများဖြင့် သွင်ပြင်လက္ခဏာရှိသော လက်နှစ်ချောင်း ဂရစ်ပါများဖြစ်သည်။နောက်တစ်ခု၊ အရေးကြီးတဲ့ ကဏ္ဍတချို့အကြောင်း ဆွေးနွေးကြည့်ရအောင်။တစ်ခုမှာ အလွန်လျင်မြန်သော လုပ်ဆောင်ချက်အမြန်နှုန်းဖြင့် သွင်ပြင်လက္ခဏာရှိသော pneumatic end clamping ယန္တရားဖြစ်ပြီး၊ fluidity သည် ဟိုက်ဒရောလစ်စနစ်မှ ဆင်းသက်လာကာ၊ အနည်းငယ်သော ဖိအားဆုံးရှုံးမှု၊ တာဝေးထိန်းချုပ်မှုအတွက် သင့်လျော်သည်။ဒုတိယမှာ အရာဝတ္ထုကို ရွှေ့ရန် စုပ်ခွက်၏ စုပ်ယူအားကို အသုံးပြုသည့် စုပ်ယူမှုအဆုံး ကုပ်ဆွဲသည့် ယန္တရားဖြစ်သည်။ဖန်၊ စက္ကူစသည်ဖြင့် အသွင်အပြင် အချိုးအဆနှင့် အထူ အလယ်အလတ် တိုးမြင့်လာသော အရာများအတွက် အဓိကအားဖြင့် သင့်လျော်ပါသည်။ တစ်ခုမှာ ဟိုက်ဒရောလစ် ကလစ်ဖြင့် အရာဝတ္ထုများကို ဟိုက်ဒရောလစ် ကလစ်နှင့် စပရိန်ထုတ်ခြင်းဖြင့် အရာဝတ္ထုများကို ကုပ်နေသော ဟိုက်ဒရောလစ် အဆုံးကုပ်စနစ် ဖြစ်သည်။သို့သော်၊ တစ်နေ့တာ၏အဆုံးတွင်၊ စက်မှုစက်ရုပ်များ၏ခြေသည်းများသည်ကျွန်ုပ်တို့၏အလုပ်များကိုပိုမိုကောင်းမွန်အောင်လုပ်ဆောင်ရန်ကူညီပေးနိုင်သည်။
2. လျှပ်စစ်ဂရစ်ပတာနှင့် အနုမြူဂရစ်ပတာကြား ကွာခြားချက်
pneumatic grippers များနှင့် နှိုင်းယှဉ်ပါက စက်မှု အလိုအလျောက်စနစ် နယ်ပယ်တွင် လျှပ်စစ် ဂရစ်ပ်များကို အသုံးချရာတွင် အောက်ပါ လက္ခဏာများ ရှိပါသည်။
1) လျှပ်စစ်မော်တာ အမျိုးအစားတွင် ပါဝါချို့ယွင်းမှုကြောင့် workpiece ပစ္စည်းများ ပျက်စီးခြင်းမှ ကာကွယ်နိုင်သည့် self-locking ယန္တရား ပါရှိသည်။pneumatic grippers များနှင့် နှိုင်းယှဉ်ပါက ပိုမိုလုံခြုံပါသည်။
2) လျပ်စစ်ဂရစ်ပါတွင် အချက်ပေါင်းများစွာ နေရာချထားခြင်းကို ရရှိရန် ပရိုဂရမ်ထိန်းချုပ်နိုင်သော လုပ်ဆောင်ချက် ပါရှိသည်။Pneumatic grippers များသည် ရပ်တန့် နှစ်ခုသာ ရှိပြီး လျှပ်စစ် ဂရစ်ပ်များသည် 256 မှတ်တိုင်ထက် ကျော်လွန်နိုင်သည်။လျှပ်စစ်လက်ချောင်းများ၏ အရှိန်နှင့် အရှိန်အဟုန်ကို workpiece ပေါ်တွင် ထိခိုက်မှုအနည်းဆုံးဖြစ်အောင် ထိန်းချုပ်နိုင်သည်။
3) electric gripper သည် တိကျသော တွန်းအားထိန်းချုပ်မှုကို ရရှိနိုင်သည့် ကွေးညွှတ်နိုင်သော gripper ဖြစ်ပြီး pneumatic gripper သည် တုန်ခါမှုဖြစ်စဉ်တစ်ခုဖြစ်သည်။နိယာမအားဖြင့် တုန်လှုပ်ခြင်း ၊ ဖယ်ရှားရန် ခက်ခဲသော တုန်လှုပ်ခြင်း ရှိပါသည်။Close-loop force control ကို နားလည်သဘောပေါက်ရန် လျှပ်စစ်ဂရစ်ပတာ၏ ကုပ်ကြိုးအား ချိန်ညှိနိုင်သည်။clamping force တိကျမှုသည် 0.01N သို့ရောက်ရှိနိုင်ပြီး တိုင်းတာမှုတိကျမှုသည် 0.005mm သို့ရောက်ရှိနိုင်သည်။pneumatic grippers များ၏ ကြံ့ခိုင်မှုနှင့် အရှိန်သည် အခြေခံအားဖြင့် ထိန်းချုပ်၍မရသောကြောင့် ၎င်းတို့ကို မြင့်မားသော ပြောင်းလွယ်ပြင်လွယ်ရှိသော ကောင်းမွန်သောအလုပ်အတွက် အသုံးမပြုနိုင်ပါ။
4) လျှပ်စစ်ဂရစ်ပါ၏ထုထည်သည် pneumatic gripper ထက်များစွာသေးငယ်သည်။တပ်ဆင်ရတာလည်း အရမ်းအဆင်ပြေပါတယ်။ပြုပြင်ထိန်းသိမ်းမှုက ရိုးရှင်းပါတယ်။
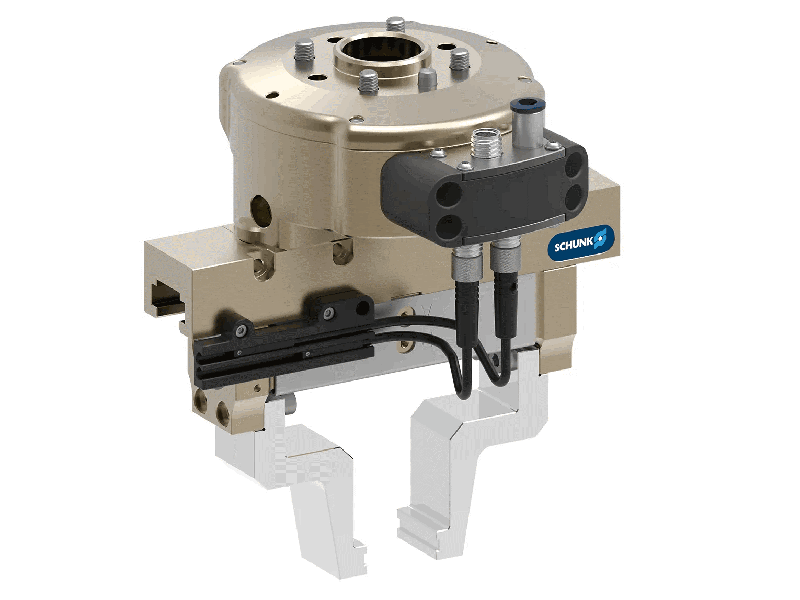
pneumatic gripper
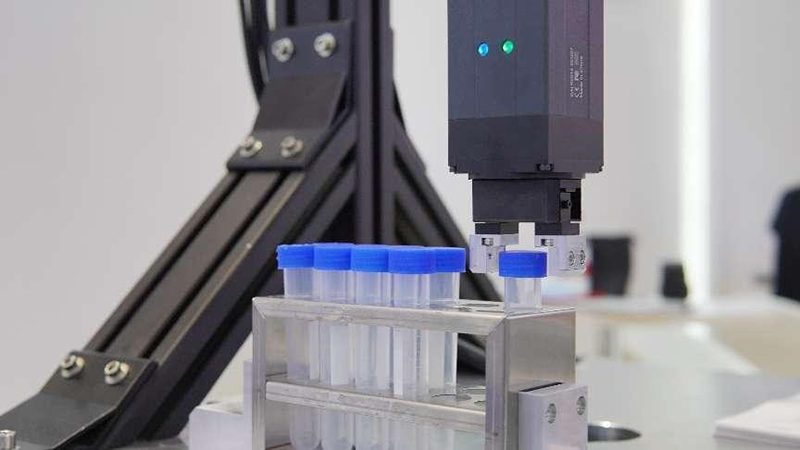 လျှပ်စစ် Gripper
လျှပ်စစ် Gripper
3. လျှပ်စစ်လက်ကိုင်ပဝါ၏အားသာချက်များ
1. မေးရိုးအနေအထားကို ထိန်းချုပ်ပါ။
ကုဒ်သွင်းထားသော မော်တာနှင့် သင့်လျော်သော ထိန်းချုပ်မှုပုံစံကို အသုံးပြုခြင်းဖြင့် မေးရိုးများ၏ အနေအထားကို ဆုံးဖြတ်နိုင်သည်။ဆန့်ကျင်ဘက်အားဖြင့်၊ ရိုးရာမေးရိုးဖြင့်၊ များသောအားဖြင့် လေဖြတ်ခြင်းကို အပြည့်အဝထိန်းထားရန် လိုအပ်ပါသည်။လျှပ်စစ် လက်ကိုင်ပရိုများကို အသုံးပြုသောအခါ၊ အစိတ်အပိုင်းနှင့် နီးစပ်သော လိုအပ်သော ရှင်းလင်းချက်ကိုသာ အသုံးပြုပြီး ခရီးသွားခြင်းကို လျှော့ချပါ။အစိတ်အပိုင်းခလုတ်များသည် ထုတ်လုပ်မှုစက်ဝန်းအချိန်များကို မထိခိုက်စေဘဲ ပိုမိုကျယ်ပြန့်သော အစိတ်အပိုင်းအရွယ်အစားများကို ရွေးချယ်ရာတွင် လွယ်ကူချောမွေ့စေသည်။
2. ချုပ်ကိုင်မှုနှင့် အရှိန်ကို ထိန်းချုပ်ပါ။
မော်တာ၏လျှပ်စီးကြောင်းသည် အသုံးပြုထားသော torque နှင့် တိုက်ရိုက်အချိုးကျသောကြောင့်၊ အသုံးပြုထားသော grip force ကို ထိန်းချုပ်နိုင်သည်။အပိတ်အမြန်နှုန်းအတွက် အတူတူပါပဲ။ဥပမာအားဖြင့်၊ ၎င်းသည် ပျက်စီးလွယ်သော အစိတ်အပိုင်းများကို ကူညီပေးနိုင်သည်။
စာတိုက်အချိန်- ဒီဇင်ဘာ-၁၉-၂၀၂၂